Sumo Battle!
The Challenge
This challenge is to design a robot that will push it's opponent out of the ring or flip it over. We are not allowed to destroy the opponent's robot.
The parameters
Here are the parameters for the robot
| sumo_robot_parameters.docx |
Research
We researched different NXT robotics champions. Here is one of them.
Design 1
The Ramp
The ramp is the first thing you notice on the robot. It's
purpose is to lift up the opponent's robot so that the opponent has no traction
to push against us. This will allow our robot to push thier robot out of the
ring. There is a hole in the center where the spear reaches through.
purpose is to lift up the opponent's robot so that the opponent has no traction
to push against us. This will allow our robot to push thier robot out of the
ring. There is a hole in the center where the spear reaches through.
The Spear
Although not nessicarily a spear. The original design did
involve a sharp point. Due to the rule that we can not break off pieces of the
other robot, we have changed it to a fist. The purpose is to continually knock
the opponent back allowing our robot to move the robot out of the ring
easier.
The spear will move by a rainling system in the
center. When the motor moves, the gears attached drive the spear
forward.
involve a sharp point. Due to the rule that we can not break off pieces of the
other robot, we have changed it to a fist. The purpose is to continually knock
the opponent back allowing our robot to move the robot out of the ring
easier.
The spear will move by a rainling system in the
center. When the motor moves, the gears attached drive the spear
forward.
The Wheels
The wheels will be a solid bar six wheels thick. On either
edge will be a silghtly smaller wheel that will allow the robot to push even
when it is tilted. In the center is a small device that allows each bar to move
independently, giving it the ability of steering.
edge will be a silghtly smaller wheel that will allow the robot to push even
when it is tilted. In the center is a small device that allows each bar to move
independently, giving it the ability of steering.
Design Troubles
In constructing the robot, some design elements were changed.
Design 2
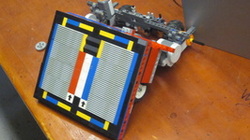
The Ramp

We made the ramp smaller. Our ramp's previous size and weight were so massive before that the robot moved too slow. The hole was patched up because of the spear being removed. The lighter ramp will be easier to move yet provide the same function. Also our face plate design has changed. Origanly saying "U mad" It is now a more simplistic design (left).
The Spear
The spear has been removed. The gear that moved the spear was not connecting well enough for it to move and occasionaly it was caught on something in the chamber.
The Wheels

We have altered the wheels. Instead of a bar of wheels, it is two wheels per motor. The individual motors provide better turning capability because they are spaced farther apart than if they turned in the center of a bar.
Additional modificatons
Support wheels
Due to the ramps still massive weight wheels will needed to be added to the ramp to reduce friction.
Our Record
Our recor so far is 1-0
OpponentUnknown
|
ResultsWin
|
Portfolio Guide Reflection
1. Our assignment was to build a robot that would disable or remove an opponents robot.
2. We needed to know what the rules and regulations were.
3. First we began by researching different robots that have won different competitions. Then we constructed the 1st draft of the robot. When complications occured we began making small changes at first. Then, since the changes didn't work when had to make drastic changes, resulting in our second draft. After testing out the robot a minor change was made and the robot was finished. All information revolving around the robots can be found in the pages above.
4. Our robot is, in the front, an ornately designed sheild plate 24 brick (1/4 inch) long and aproametly 20 brick tall. The supports are made of long gray smooth peices that flow in a step pyramid flow to the motors. The two motors have two wheels on either side without a gear system and connecting the two together is a rotating differntial that allows the motors to move independently and keep them connected.
5. The feedback I recieved from other students and my teacher was very helpful. They suggested that I placed weights on the wheels so that they would have traction to move the robot.
6. I learned that not every idea I have is a good one. The robotic fist was an absolute failure and because of this we removed it.
7. I would try to improve the stearing of the robot. Other than that I enjoyed the entire robot.
