The Rubric

No rubiric available.
1) Problem
Construct a robot that will retrieve an object using only a video camera to observe the environment.
2) Research
Here is one of the videos that we used in our research.
3) Design 1
In design 1 we used a claw mechanism and a tank wheel system.
The claw mechanism is very basic it is comprised of two small gears in the center and two large gears on the outer edge. The large gears have prongs attached to them so that it can capture an object. The gears are alined in this fasion however so that the prongs rotate in opposite directions allowing them to open and close.
The tank gear system was used so that the robot would navigate tight corners. It was comprised of a little gear on the motor smaller gears to them and progressivly lager gears. The largest gears held the wheels.
The claw mechanism is very basic it is comprised of two small gears in the center and two large gears on the outer edge. The large gears have prongs attached to them so that it can capture an object. The gears are alined in this fasion however so that the prongs rotate in opposite directions allowing them to open and close.
The tank gear system was used so that the robot would navigate tight corners. It was comprised of a little gear on the motor smaller gears to them and progressivly lager gears. The largest gears held the wheels.
4) Design 2
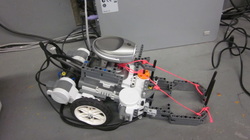
We changed very little in our claw mechanism. Other than tying strings to it to give supprot the claw was un changed. the wheels, however, underwent a drastic change. The gear system was removed and the 4 medium wheelas were replaced with 2 very large wheels. The weight from the claw allow the robot not to tilt back or pull a wheelie. If it's pulling a wheelie the claws are up too high to grab any thing.
The object to capture.

Yes, it's a duck. We are playing Duck Hunt...with robots.
5) The results
Success! The duck was captured! It was disorienting using only a camera for sight and occasionally the robot was stuck but all-in-all, it all worked like a dream.
6) How our robot was effective
Our robot was effective because it captured the duck and used only the camera for guidance.
7) What I would change
It would be to remove the swivel wheel. Its intent was to stop the robot from doing a wheelie. Sadly, problems occurred. When we attempted to reverse directions, the wheel would jam. The wheel was also responsible for the hook that occurred when trying to drive strait. When we removed it after capturing the duck the first time, we discovered that the robot could not pull a wheelie due to our claws weight, in addition handling and speed were greatly increased. We will not be using the swivel wheel in our final test.
Portfolio Guide Reflection
| portfolio_guide_reflection.docx |
